
Pezas Cama soldada dunha peza con estrutura colgante lateral
Cama soldada dunha peza con estrutura colgante lateral A bancada adopta unha estrutura de suspensión lateral e unha bancada soldada dunha soa peza, que está recocida para eliminar a tensión interna. Despois do mecanizado en bruto, realízase un envellecemento por vibración antes do mecanizado final, mellorando así en gran medida a rixidez e a estabilidade da máquina ferramenta e garantindo a precisión da máquina ferramenta. O accionamento do servomotor de CA está controlado polo sistema de control numérico e o mandril realiza un movemento alternativo na dirección Y despois de que o motor accione, realizando un movemento rápido e movemento de alimentación. Tanto a cremalleira do eixe Y como o carril guía lineal están feitos de produtos de alta precisión, o que garante eficazmente a precisión da transmisión; os interruptores de límite en ambos os extremos da carreira están controlados e instálase un dispositivo de límite ríxido ao mesmo tempo, o que garante eficazmente a seguridade do movemento da máquina ferramenta; a máquina ferramenta está equipada cun dispositivo de lubricación automático que engade aceite lubricante ás partes móbiles da bancada a intervalos regulares para garantir que as partes móbiles funcionen en boas condicións, o que pode mellorar a vida útil dos carriles guía, engrenaxes e cremalleiras.
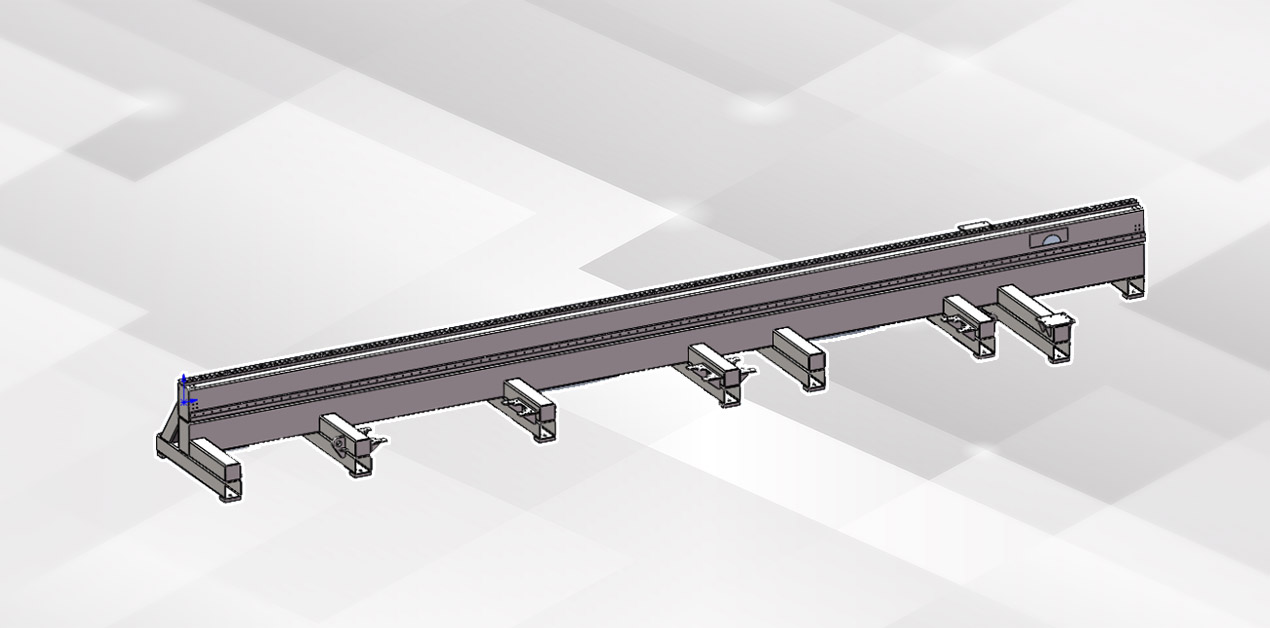
Hai 2 conxuntos de mecanismos de soporte instalados na cama, e hai dous tipos dispoñibles: 1. O soporte de seguimento está controlado por un servomotor independente para moverse cara arriba e cara abaixo, principalmente para levar a cabo o soporte de seguimento para a deformación excesiva de tubos de corte longo (tubos con diámetros pequenos). Cando o mandril traseiro se move á posición correspondente, o soporte auxiliar pódese baixar para evitalo. 2. O soporte da roda de diámetro variable é elevado e baixado polo cilindro e pódese axustar manualmente a diferentes posicións de escala para soportar tubos de diferentes tamaños.
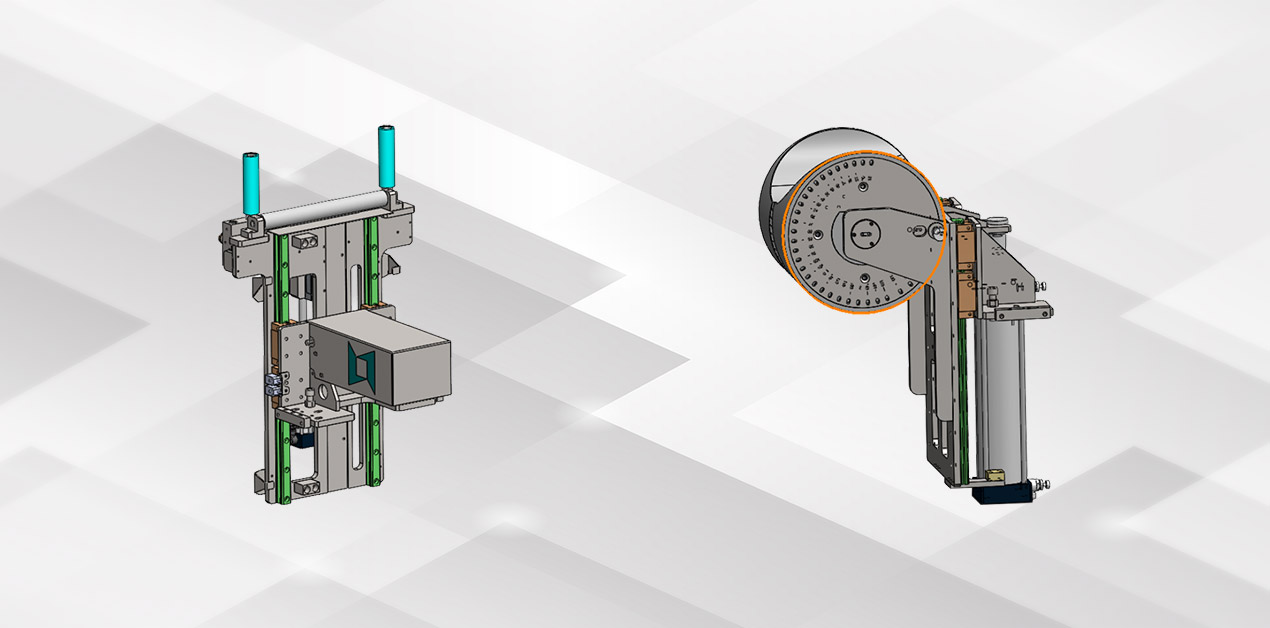
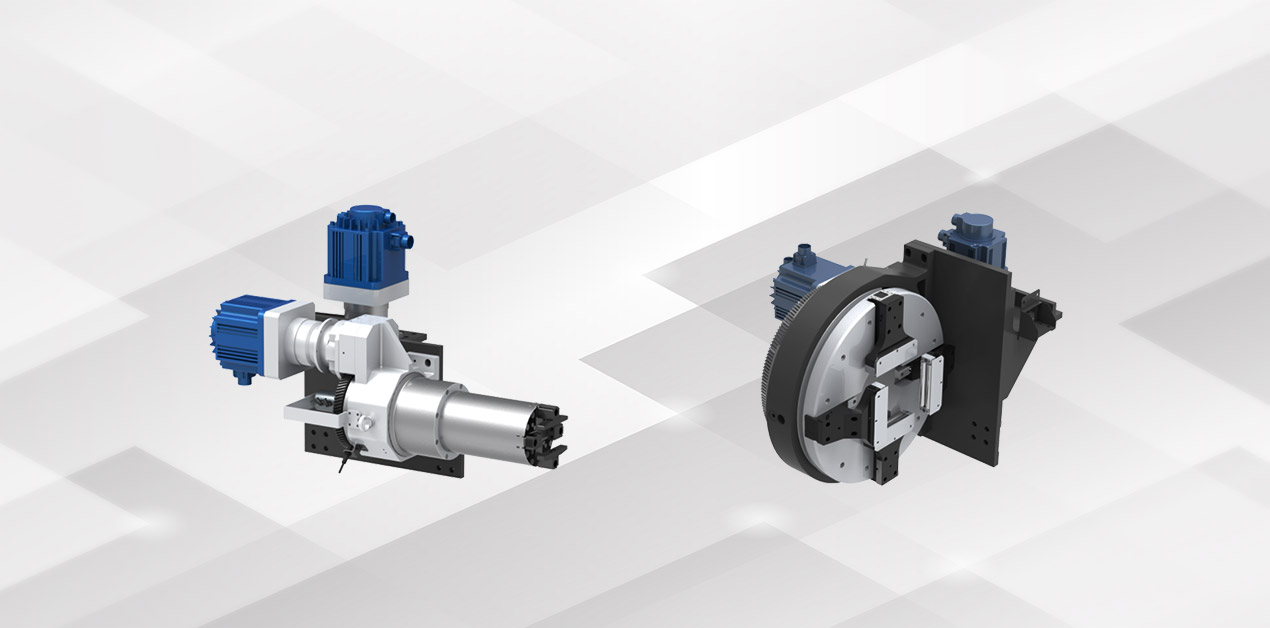
O mandril divídese en dous mandriles pneumáticos de carreira completa, dianteiro e traseiro, que poden moverse na dirección Y. O mandril traseiro é o responsable de suxeitar e alimentar o tubo, e o mandril dianteiro está instalado no extremo da cama para suxeitar materiais. Os mandriles dianteiro e traseiro son accionados respectivamente por servomotores para lograr unha rotación síncrona. Baixo a suxeición conxunta de mandriles dobres, pódese realizar un corte de cola curta, e a cola curta da boca pode alcanzar os 20-40 mm, ao tempo que admite o corte de cola curta de cola máis longa. A máquina de corte de tubos da serie TN adopta o método de movemento e evitación do mandril, que pode realizar o corte con dous mandriles todo o tempo, e non fará que o tubo sexa demasiado longo e inestable, e a precisión non sexa suficiente.
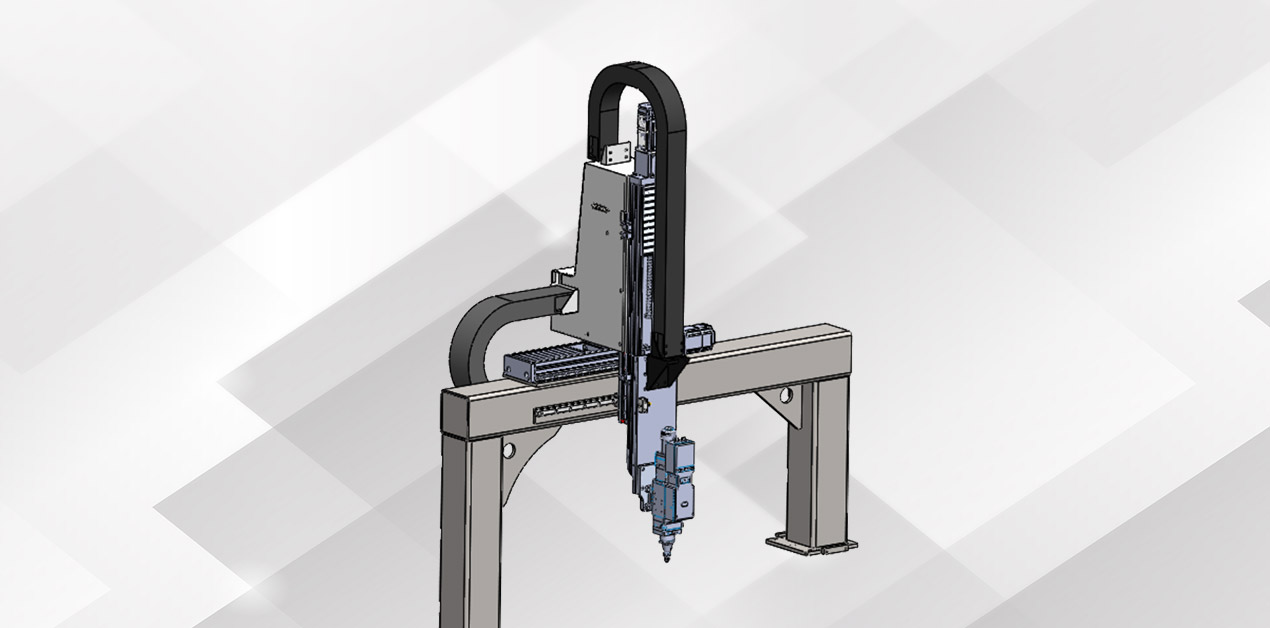
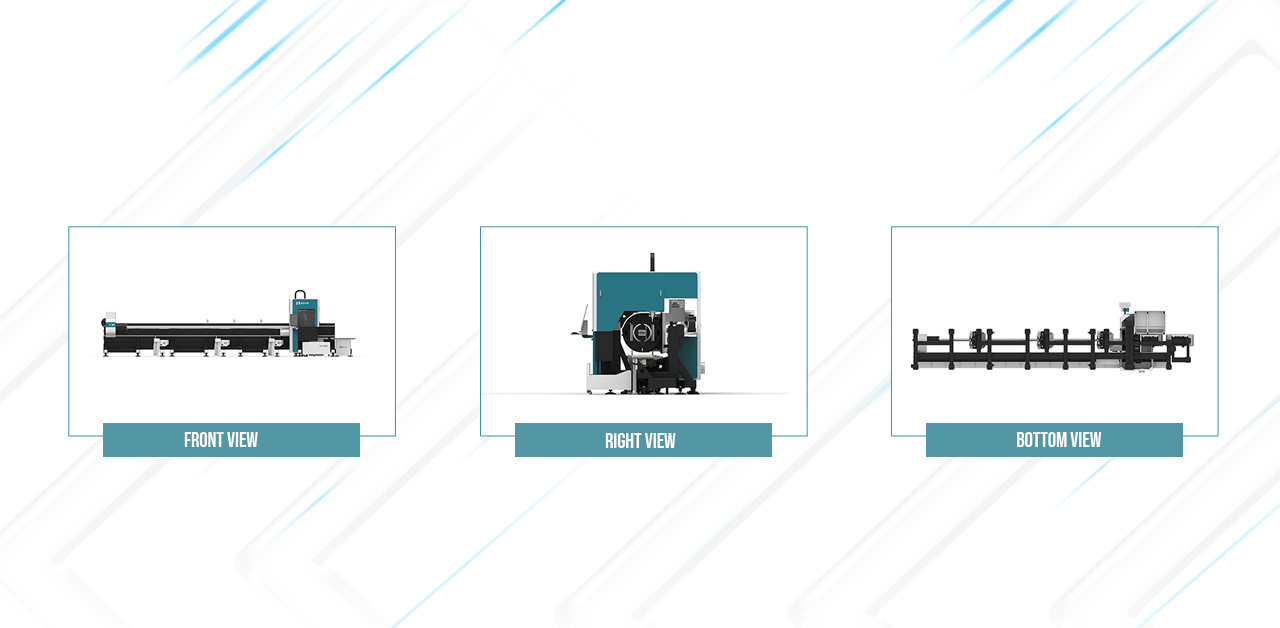
A viga transversal do dispositivo do eixe X adopta unha estrutura de pórtico, soldada por unha combinación de tubo cadrado e placa de aceiro. O compoñente do pórtico está fixado na base e o eixe X é accionado por un servomotor para accionar a cremalleira e o piñón para realizar o movemento alternativo da placa deslizante na dirección X. No proceso de movemento, o interruptor de límite controla a carreira para limitar a posición para garantir a seguridade do funcionamento do sistema. Ao mesmo tempo, o eixe X/Z ten a súa propia cuberta de órgano para protexer a estrutura interna e lograr unha mellor protección e efectos de eliminación de po. O dispositivo do eixe Z realiza principalmente o movemento cara arriba e cara abaixo da cabeza do láser. O eixe Z pódese usar como un eixe CNC para realizar o seu propio movemento de interpolación e, ao mesmo tempo, pódese vincular cos eixes X e Y e tamén se pode cambiar ao control de seguimento para satisfacer as necesidades de diferentes situacións.